« Previous « Start » Next »
7 LLS Problem
The
linear least squares (
lls) problem is defined as
|
|
|
|
| |
|
| s/t |
| xL |
≤ |
x |
≤ |
xU, |
| bL |
≤ |
A x |
≤ |
bU |
|
|
(9) |
where
x,
xL,
xU  Rn
Rn,
d RM,
C
RM × n,
A Rm1 × n and
bL,
bU Rm1.
The following code defines and solves a problem in TOMNET.
using System;
using TOMNET;
namespace TOMNET
{
/// <summary>
/// Quick guide class for linear least squares problem.
/// </summary>
public class llsQG
{
/// <summary>
/// Testprogram for llsQG.
/// </summary>
static void Main()
{
//
// For use in bounds.
//
double Inf = double.PositiveInfinity;
//
// Number of decision variables, linear constraints
// and observations
//
const int n = 9;
const int mLin = 3;
const int k = 10;
//
// Lower and upper bounds for the decision variables
//
double[] x_L = new double[n] { -2, -2, -Inf, -2, -2, -2, -2, -2,
-2 };
double[] x_U = new double[n] { 2, 2, 2, 2, 2, 2, 2, 2, 2 };
//
// Matrix defining linear constraints
//
double[] A = new double[n * mLin]
{ 1, 1, 1, 1, 1, 1, 1, 1, 4,
1, 2, 3, 4, -2, 1, 1, 1, 1,
1, -1, 1, -1, 1, 1, 1, 1, 1};
//
// Lower and upper bounds on the linear constraints
//
double[] b_L = new double[mLin] { 2, -Inf, -4 };
double[] b_U = new double[mLin] { Inf, -2, -2 };
//
// Vector k x 1 with observations in objective ||Cx - d||
//
double[] d = new double[k] { 1, 1, 1, 1, 1, 1, 1, 1, 1, 1 };
//
// Matrix m x n in objective ||Cx - d||
//
double[] C = new double[90]
{ 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 2, 1, 1, 1, 1, 2, 0, 0,
1, 1, 3, 1, 1, 1, -1, -1, -3,
1, 1, 1, 4, 1, 1, 1, 1, 1,
1, 1, 1, 3, 1, 1, 1, 1, 1,
1, 1, 2, 1, 1, 0, 0, 0, -1,
1, 1, 1, 1, 0, 1, 1, 1, 1,
1, 1, 1, 0, 1, 1, 1, 1, 1,
1, 1, 0, 1, 1, 1, 2, 2, 3,
1, 0, 1, 1, 1, 1, 0, 2, 2};
//
// Starting point.
//
double[] x_0 = new double[n];
for (int i = 0; i < n; i++)
{
x_0[i] = 1.0 / i;
}
//
// Creating the problem, solver and result
//
LinearLeastSquaresProblem Prob = new LinearLeastSquaresProblem(
n, mLin, k, C, d, A, b_L, b_U, x_0, x_L, x_U);
SNOPT solver = new SNOPT();
Result result;
//
// Setting a print file for SNOPT
//
string printfilename = "SnoptllsQG.txt";
solver.Options.PrintFile = printfilename;
Prob.Name = "llsQG";
//
// Calling Solve to get a Result object
//
solver.Solve(Prob, out result);
//
// Extract solution and objective from result
//
double[] solution = result.x_k;
double objective = result.f_k;
//
// Display the solution on the console.
//
Console.WriteLine(" * * * * * * * *");
Console.WriteLine(" * Solved " + Prob.Name);
Console.WriteLine(" * Printfile: " + printfilename);
Console.WriteLine(" * Objective: {0,10:g8}", objective);
Console.WriteLine(" * Solution");
Console.WriteLine(" x_L[i] <= x_k[i] <= x_U[i]");
for (int i = 0; i < solution.Length; i++)
{
Console.WriteLine(" {0,10:g3} <= {1,10:g3} <= {2,10:g3} ",
Prob.x_L[i], solution[i], Prob.x_U[i]);
}
//
// Print linear constraints
//
Console.WriteLine(" * Linear constraints");
Console.WriteLine(" b_L[i] <= (A*x)[i] <= b_U[i]");
double[] Ax = Prob.A.Evaluate(result.x_k);
for (int i = 0; i < Prob.mLin; i++)
{
Console.WriteLine(" {0,10:g3} <= {1,10:g3} <= {2,10:g3}",
Prob.A.GetLowerBound(i), Ax[i], Prob.A.GetUpperBound(i));
}
}
}
}
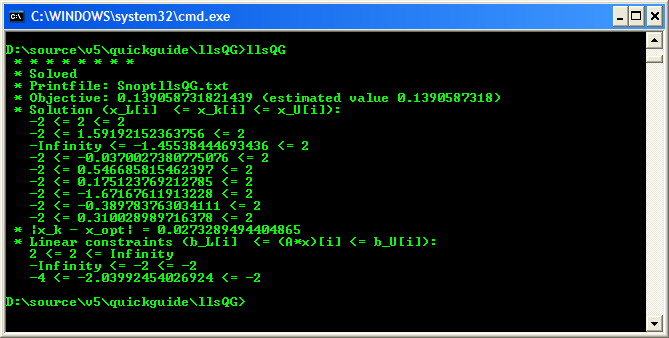
The following picture shows the correct output results:
« Previous « Start » Next »