We will now solve the same problem as in brachistochrone.m, but using a DAE formulation for the mechanics.
In a DAE formulation we don’t need to formulate explicit equations for the time-derivatives of each state. Instead we can, for example, formulate the conservation of energy.
| Ekin = |
|    |
| 2 + |
| 2 |    | , |
| Epot = m g y . |
The boundary conditions are still A = (0,0), B = (10,-3), and an initial speed of zero, so we have
| Ekin + Epot = 0 |
For complex mechanical systems, this freedom to choose the most convenient formulation can save a lot of effort in modelling the system. On the other hand, computation times may get longer, because the problem can to become more non-linear and the jacobian less sparse.
Reference: [6]
toms t
toms t_f
p = tomPhase('p', t, 0, t_f, 20);
setPhase(p);
tomStates x y
% Initial guess
x0 = {t_f == 10};
% Box constraints
cbox = {0.1 <= t_f <= 100};
% Boundary constraints
cbnd = {initial({x == 0; y == 0})
final({x == 10; y == -3})};
% Expressions for kinetic and potential energy
m = 1;
g = 9.81;
Ekin = 0.5*m*(dot(x).^2+dot(y).^2);
Epot = m*g*y;
v = sqrt(2/m*Ekin);
% ODEs and path constraints
ceq = collocate(Ekin + Epot == 0);
% Objective
objective = t_f;
options = struct;
options.name = 'Brachistochrone-DAE';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
x = subs(collocate(x),solution);
y = subs(collocate(y),solution);
v = subs(collocate(v),solution);
t = subs(collocate(t),solution);
Problem type appears to be: lpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Brachistochrone-DAE f_k 1.869963310229847400
sum(|constr|) 0.000000000158881015
f(x_k) + sum(|constr|) 1.869963310388728300
f(x_0) 10.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 168 ConJacEv 168 Iter 93 MinorIter 154
CPU time: 0.203125 sec. Elapsed time: 0.219000 sec.
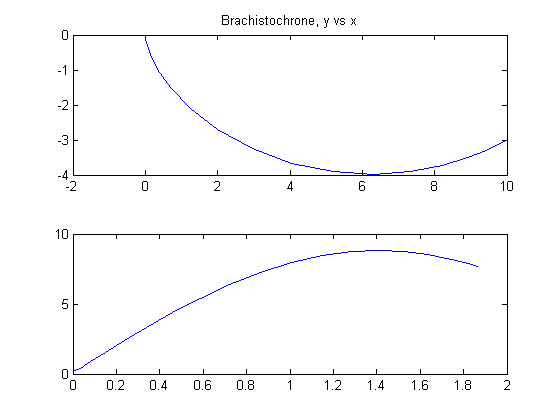
To obtain the brachistochrone curve, we plot y versus x.
subplot(2,1,1)
plot(x, y);
title('Brachistochrone, y vs x');
subplot(2,1,2)
plot(t, v);