ITERATIVE DYNAMIC PROGRAMMING, REIN LUUS
Section 7.4.4 Gas absorber with a large number of plates
CHAPMAN & HALL/CRC Monographs and Surveys in Pure and Applied Mathematics
A general case of an n-plate gas absorber controlled by inlet feed stream concentrations
Find u over t in [0; 10 ] to minimize
| J = | ∫ |
| x′*x + u′*u dt |
subject to:
| = A*x + B*u |
A = tridiag(0.538998 -1.173113 0.634115)
B = [0.538998 0 ... 0 0; 0 0 ... 0 0.634115]
The initial condition is chosen as:
xi(0) = -0.0307-(i-1)/(n-1)*(0.1273-0.0307), i= 1, 2, ... , n. where n is the number of stages
| 0 <= u1 <= inf |
| 0 <= u2 <= inf |
Reference: [25]
toms t
n = 10;
t_f = 10;
p = tomPhase('p', t, 0, t_f, 20);
setPhase(p);
x = tomState(p, 'x', n, 1);
u = tomControl(p, 'u', 2, 1);
i = (1:n)';
x0i = -0.0307-(0.1273-0.0307)/(n-1)*(i-1);
% Initial guess
% Note: The guess for t_f must appear in the list before expression involving t.
guess = icollocate(x == x0i);
% Box constraints
cbox = {0 <= collocate(u)};
% Initial conditions
cinit = initial(x == x0i);
% Various constants and expressions
A = spdiags([0.538998*ones(n,1) ...
-1.173113*ones(n,1) 0.634115*ones(n,1)],-1:1,n,n);
B = sparse(n,2);
B(1,1) = 0.538998;
B(end,2) = 0.634115;
% ODEs and path constraints
ceq = collocate(dot(x) == A*x+B*u);
% Objective
objective = integrate(x'*x+u'*u);
options = struct;
options.name = 'Linear Gas Absorber';
solution = ezsolve(objective, {cbox, ceq, cinit}, guess, options);
% Extract optimal states and controls from solution
Problem type appears to be: qp
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: 1: Linear Gas Absorber f_k 0.328245958214705650
sum(|constr|) 0.000000000000006954
f(x_k) + sum(|constr|) 0.328245958214712590
f(x_0) 0.000000000000000000
Solver: CPLEX. EXIT=0. INFORM=1.
CPLEX Barrier QP solver
Optimal solution found
FuncEv 15 GradEv 15 ConstrEv 15 Iter 15
CPU time: 0.109375 sec. Elapsed time: 0.062000 sec.
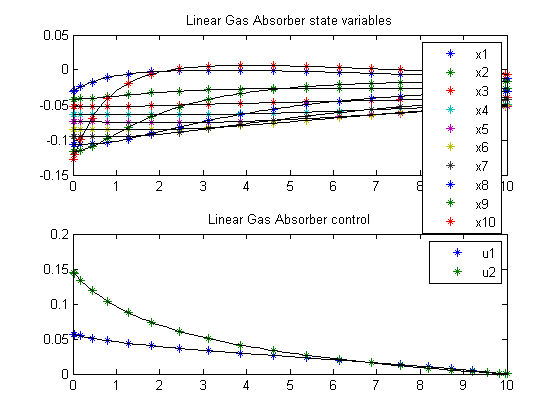
subplot(2,1,1)
ezplot(x);
legend('x1','x2','x3','x4','x5','x6','x7','x8','x9','x10')
title('Linear Gas Absorber state variables');
subplot(2,1,2)
ezplot(u);
legend('u1', 'u2');
title('Linear Gas Absorber control');