SOCS 6.5.0 Manual
7.4.4 Maximum Crossrange Space Shuttle Reentry Problem.
Find u over t in [0; t ] to maximize
| J = lat |
subject to:
The equations given in the code below.
Reference: [5]
toms t t_f
% Scaled time
p1 = tomPhase('p1', t, 0, t_f, 30);
setPhase(p1);
tomStates alt long lat vel ggamma azi
tomControls aalpha bbeta
% Constants
tGuess = 2000;
tMax = 4000;
tMin = 100;
cr2d = 180/pi;
betalim = 90;
weight = 203000;
cm2w = 32.174;
cea = 20902900;
mmu = 0.14076539e17;
rho0 = 0.002378;
href = 23800;
cl0 = -0.20704;
cl1 = 0.029244;
cd0 = 0.07854;
cd1 = -6.1592e-3;
cd2 = 6.21408e-4;
sref = 2690;
alt0 = 260000;
altf = 80000;
vel0 = 25600;
velf = 2500;
% Initial guess
x0 = {
t_f == 1000
icollocate({
alt == alt0-(alt0-altf)*t/t_f
long == -0.5*90/cr2d
lat == -89/cr2d
vel == vel0-(vel0-velf)*t/t_f
ggamma == -1/cr2d-4/cr2d*t/t_f
azi == pi/2-pi*t/t_f
})
collocate({
aalpha == 0
bbeta == 1/cr2d
})
};
% Boundary constraints
cbnd = {
initial({
alt == alt0
long == -0.5*75.3153/cr2d
lat == 0
vel == 25600
ggamma == -1/cr2d
azi == 90/cr2d
aalpha == 17/cr2d
bbeta == -betalim/cr2d
})
final({
alt == altf
vel == velf
ggamma == -5/cr2d
})};
% Box constraints
cbox = {
100 <= t_f <= 5000
0 <= icollocate(alt) <= 300000
-0.5*90/cr2d <= icollocate(long) <= 0.5*90/cr2d
-89/cr2d <= icollocate(lat) <= 89/cr2d
1000 <= icollocate(vel) <= 40000
-89/cr2d <= icollocate(ggamma) <= 89/cr2d
-pi <= icollocate(azi) <= pi
-89/cr2d <= collocate(aalpha) <= 89/cr2d
-betalim/cr2d <= collocate(bbeta) <= 1/cr2d
};
mass = weight/cm2w;
alphad = cr2d*aalpha;
radius = cea+alt;
grav = mmu./radius.^2;
rhodns = rho0*exp(-alt/href);
dynp = 0.5*rhodns.*vel.^2;
subl = cl0+cl1*alphad;
subd = cd0+cd1+cd2*alphad.*alphad;
drag = dynp.*subd*sref;
lift = dynp.*subl*sref;
vrelg = vel./radius-grav./vel;
% ODEs and path constraints
ceq = collocate({
dot(alt) == vel.*sin(ggamma)
dot(long) == vel.*cos(ggamma).*sin(azi)./(radius.*cos(lat))
dot(lat) == vel.*cos(ggamma).*cos(azi)./radius
dot(vel) == -drag./mass-grav.*sin(ggamma)
dot(ggamma) == lift.*cos(bbeta)./(mass.*vel)+cos(ggamma).*vrelg
dot(azi) == lift.*sin(bbeta)./(mass.*vel.*cos(ggamma))+...
vel.*cos(ggamma).*sin(azi).*sin(lat)./(radius.*cos(lat))
});
% Objective
objective = -final(lat)*180/pi;
options = struct;
options.name = 'Shuttle Reentry';
options.Prob.SOL.optPar(30) = 100000;
options.scale = 'auto';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
Problem type appears to be: lpcon
Auto-scaling
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Shuttle Reentry f_k -15.142919504993619000
sum(|constr|) 0.000000001777377229
f(x_k) + sum(|constr|) -15.142919503216243000
f(x_0) -0.000000000000795808
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 1366 ConJacEv 1364 Iter 207 MinorIter 6563
CPU time: 26.031250 sec. Elapsed time: 14.609000 sec.
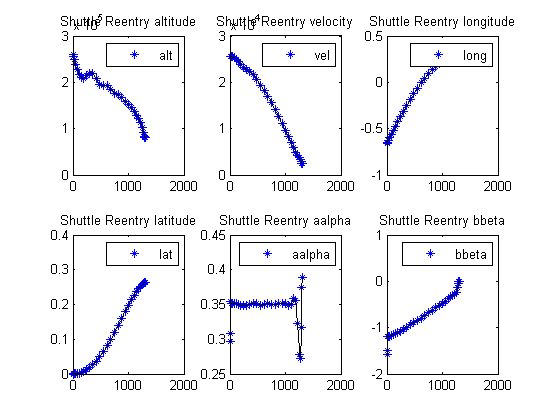
subplot(2,3,1)
ezplot(alt)
legend('alt');
title('Shuttle Reentry altitude');
subplot(2,3,2)
ezplot(vel)
legend('vel');
title('Shuttle Reentry velocity');
subplot(2,3,3)
ezplot(long)
legend('long');
title('Shuttle Reentry longitude');
subplot(2,3,4)
ezplot(lat)
legend('lat');
title('Shuttle Reentry latitude');
subplot(2,3,5)
ezplot(aalpha)
legend('aalpha');
title('Shuttle Reentry aalpha');
subplot(2,3,6)
ezplot(bbeta)
legend('bbeta');
title('Shuttle Reentry bbeta');