« Previous « Start » Next »
121 Two-Link Robotic Arm
ITERATIVE DYNAMIC PROGRAMMING, REIN LUUS
12.4.2 Example 2: Two-link robotic arm
CHAPMAN & HALL/CRC Monographs and Surveys in Pure and Applied Mathematics
121.1 Problem Formulation
Find u over t in [0; t_F ] to minimize
subject to:
| = | | sin(x3)*( | | *cos(x3)*x12+2*x22) + | | *(u1−u2) − | | *cos(x3)*u2 |
|
|
|
| |
| = − | | sin(x3)*( | | *x12+ | | *cos(x3)*x22) − | | *u2 + | | *cos(x3)*(u1−u2) |
|
|
|
| |
The initial condition are:
Reference: [25]
121.2 Problem setup
toms t t_f
p = tomPhase('p', t, 0, t_f, 30);
setPhase(p);
tomStates x1 x2 x3 x4
tomControls u1 u2
% Initial guess
x0 = {t_f == 3
icollocate({x1 == 0; x2 == 0
x3 == 0.5; x4 == 0.522})
collocate({u1 == 1-2*t/t_f
u2 == 1-2*t/t_f})};
% Box constraints
cbox = {2.6 <= t_f <= 100
-1 <= collocate(u1) <= 1
-1 <= collocate(u2) <= 1};
% Boundary constraints
cbnd = {initial({x1 == 0; x2 == 0
x3 == 0.5; x4 == 0})
final({x1 == 0; x2 == 0
x3 == 0.5; x4 == 0.522})};
% ODEs and path constraints
ceq = collocate({
dot(x1) == ( sin(x3).*(9/4*cos(x3).*x1.^2+2*x2.^2) ...
+4/3*(u1-u2) - 3/2*cos(x3).*u2 )./ (31/36 + 9/4*sin(x3).^2)
dot(x2) == -( sin(x3).*(7/2*x1.^2 + 9/4*cos(x3).*x2.^2) ...
- 7/3*u2 + 3/2*cos(x3).*(u1-u2) )./ (31/36 + 9/4*sin(x3).^2)
dot(x3) == x2-x1
dot(x4) == x1});
% Objective
objective = t_f;
121.3 Solve the problem
options = struct;
options.name = 'Two Link Robotic Arm';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
t = subs(collocate(t),solution);
x1 = subs(collocate(x1),solution);
x2 = subs(collocate(x2),solution);
x3 = subs(collocate(x3),solution);
x4 = subs(collocate(x4),solution);
u1 = subs(collocate(u1),solution);
u2 = subs(collocate(u2),solution);
Problem type appears to be: lpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Two Link Robotic Arm f_k 2.983364855223869000
sum(|constr|) 0.000000154455635731
f(x_k) + sum(|constr|) 2.983365009679504800
f(x_0) 3.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 20 ConJacEv 20 Iter 16 MinorIter 278
CPU time: 0.203125 sec. Elapsed time: 0.219000 sec.
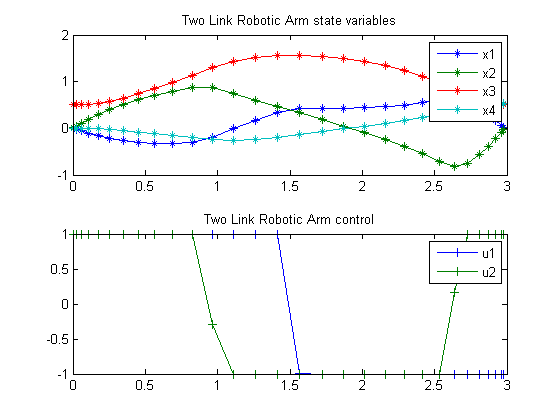
121.4 Plot result
subplot(2,1,1)
plot(t,x1,'*-',t,x2,'*-',t,x3,'*-',t,x4,'*-');
legend('x1','x2','x3','x4');
title('Two Link Robotic Arm state variables');
subplot(2,1,2)
plot(t,u1,'+-',t,u2,'+-');
legend('u1','u2');
title('Two Link Robotic Arm control');
« Previous « Start » Next »
