« Previous « Start » Next »
79 Orbit Raising Minimum Time
79.1 Problem description
Minimize:
subject to the dynamic constraints
the boundary conditions
where w1 = sin(phi) and w2 = cos(phi)
At t_f, r and m are free.
Reference: [5]
79.2 Problem setup
mmu = 1;
t_f = 3.32; m_0 = 1; r_0 = 1; u_0 = 0;
u_f = 0; v_0 = sqrt(mmu/r_0); rmin = 0.9; rmax = 5;
umin = -5; umax = 5; vmin = -5; vmax = 5;
mmax = m_0; mmin = 0.1; tf_min = 0.5; tf_max = 10;
r_f = 1.5;
T = 0.1405;
Ve = 1.8758;
toms t t_f
p1 = tomPhase('p1', t, 0, t_f, 50);
setPhase(p1);
tomStates r u v m
% The problem becomes less nonlinear if w1 and w2 are control variables
% (with the constraints w1^2+w2^2==1) than if phi is the control varialbe
% (with w1 and w2 being nonlinear functions of phi).
tomControls w1 w2
phi = atan2(w1,w2);
% Initial guess
x0 = {t_f == 3.32
icollocate({
r == r_0+(r_f-r_0)*t/t_f
u == 0.1
v == v_0
m == m_0-(T/Ve)*t})
collocate({
w1 == -0.7*sign(t-t_f/2)
w2 == 0.4
})};
% Boundary constraints
cbnd = {initial({
r == r_0
u == u_0
v == v_0
m == m_0
})
final({
r == r_f
u == u_f
v == sqrt(mmu/r)})};
% Box constraints
cbox = {0.5 <= t_f <= 10
rmin <= icollocate(r) <= rmax
umin <= icollocate(u) <= umax
vmin <= icollocate(v) <= vmax
};
% ODEs and path constraints
ceq = collocate({
dot(r) == u
dot(u) == v^2/r-mmu/r^2+T*w1/m
dot(v) == -u*v/r+T*w2/m
dot(m) == -T/Ve
w1^2+w2^2 == 1
});
% Objective
objective = t_f;
79.3 Solve the problem
options = struct;
options.name = 'Orbit Raising Problem Min Time';
options.scale = 'manual'; % Auto-scaling is not really needed as all variables are already reasonably scaled.
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
Problem type appears to be: lpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Orbit Raising Problem Min Time f_k 3.248079535630944200
sum(|constr|) 0.000032253415551923
f(x_k) + sum(|constr|) 3.248111789046496300
f(x_0) 3.319999999999999800
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 68 ConJacEv 68 Iter 35 MinorIter 283
CPU time: 2.140625 sec. Elapsed time: 1.187000 sec.
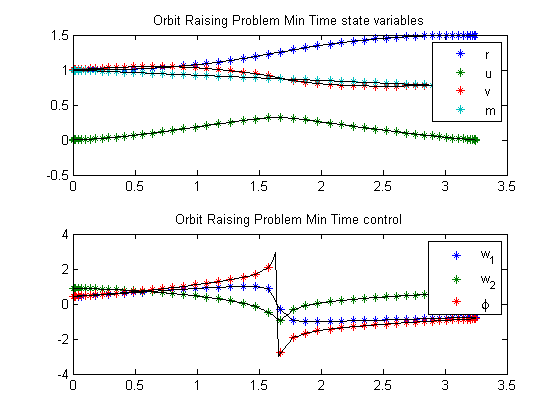
79.4 Plot result
subplot(2,1,1)
ezplot([r u v m]);
legend('r','u','v','m');
title('Orbit Raising Problem Min Time state variables');
subplot(2,1,2)
ezplot([w1 w2 phi])
legend('w_1', 'w_2', '\phi');
title('Orbit Raising Problem Min Time control');
« Previous « Start » Next »
