Function Space Complementarity Methods for Optimal Control Problems, Dissertation, Martin Weiser
Find u over t in [-0.5; 0.5 ] to minimize:
| J = | ∫ |
| t*u dt |
subject to:
| |u| <= 1 |
Reference: [34]
toms t
p = tomPhase('p', t, -0.5, 1, 20);
setPhase(p);
tomStates x
tomControls u
% Initial guess
x0 = {collocate(u == 1-2*(t+0.5))
icollocate(x == 1-2*(t+0.5))};
% Box constraints
cbox = {-1 <= icollocate(x) <= 1
-1 <= collocate(u) <= 1};
% ODEs and path constraints
ceq = collocate(dot(x) == 0);
% Objective
objective = integrate(t.*u);
options = struct;
options.name = 'Simple Bang Bang Problem';
solution = ezsolve(objective, {cbox, ceq}, x0, options);
t = subs(collocate(t),solution);
u = subs(collocate(u),solution);
Problem type appears to be: lp
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Simple Bang Bang Problem f_k -0.250490325030179710
sum(|constr|) 0.000000000000810402
f(x_k) + sum(|constr|) -0.250490325029369300
f(x_0) 0.000000000000000000
Solver: CPLEX. EXIT=0. INFORM=1.
CPLEX Dual Simplex LP solver
Optimal solution found
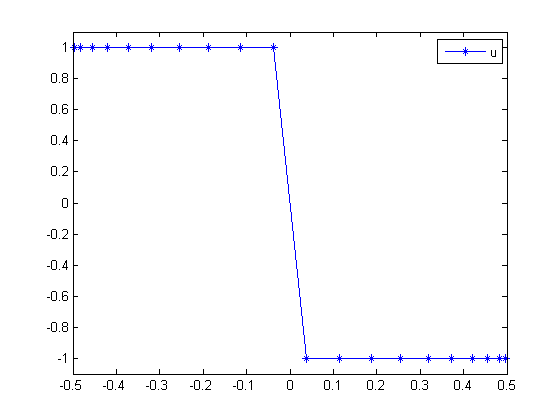
figure(1);
plot(t,u,'*-');
legend('u');
ylim([-1.1,1.1]);