Minimum energy orbit transfer of a spacecraft with limited variable thrust.
From the paper: Low thrust, high-accuracy trajectory optimization, I. Michael Ross, Qi Gong and Pooya Sekhavat.
Programmers: Li Jian (Beihang University)
% Array with consecutive number of collocation points narr = [40 80]; toms t; toms t_f; t0 = 0; tfmax = 57; for n=narr
%p = tomPhase('p', t, 0, t_f-t0, n, [], 'cheb');
p = tomPhase('p', t, 0, t_f-t0, n);
setPhase(p)
tomStates r theta vr vt
tomControls ur ut
% Parameters
r0 = 1; theta0 = 0; vr0 = 0; vt0 = 1;
r_f = 4; vrf = 0; vtf = 0.5;
umax = 0.01;
% Initial state
xi=[r0; theta0; vr0; vt0];
% Initial guess
if n==narr(1)
x0 = {t_f == 57;
icollocate({r == xi(1); theta == xi(2); vr == xi(3); vt == xi(4)})
collocate({ur == 0; ut == umax})};
else
x0 = {t_f == tfopt;
icollocate({r == xopt1; theta == xopt2; vr == xopt3; vt == xopt4});
collocate({ur == uopt1; ut == uopt2})};
end
% Box constraints
cbox = {10 <= t_f<= tfmax;
1 <= collocate(r) <= 4;
0 <= collocate(vr) <= 0.5;
0 <= collocate(vt) <= 1;
-umax <= collocate(ur) <= umax;
-umax <= collocate(ut) <= umax};
% Boundary constraints
cbnd = {initial({r == r0; theta == theta0; vr == vr0; vt == vt0})
final({r == r_f; vr == 0; vt == vtf})};
% ODEs and path constraints
d_r = vr;
dtheta = vt./r;
dvr = vt.*vt./r - 1.0./r./r + ur;
dvt = -vr.*vt./r + ut;
ceq = collocate({
dot(r) == d_r;
dot(theta) == dtheta;
dot(vr) == dvr;
dot(vt) == dvt;
0<=(ur.*ur+ut.*ut).^0.5<=umax});
% Objective
objective = integrate((ur.^2+ut.^2).^0.5);
options = struct;
options.type = 'con';
options.name = 'Min Energy Transfer';
Prob = sym2prob(objective, {cbox, cbnd, ceq}, x0, options);
Prob.KNITRO.options.ALG = 1;
Prob.KNITRO.options.HONORBNDS = 0;
Result = tomRun('knitro', Prob, 1);
solution = getSolution(Result);
xopt1 = subs(r,solution);
xopt2 = subs(theta,solution);
xopt3 = subs(vr,solution);
xopt4 = subs(vt,solution);
uopt1 = subs(ur,solution);
uopt2 = subs(ut,solution);
tfopt = subs(t_f,solution);
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Min Energy Transfer f_k 0.523205792272900430
sum(|constr|) 0.000002310623001201
f(x_k) + sum(|constr|) 0.523208102895901580
f(x_0) 0.569999999999999170
Solver: KNITRO. EXIT=0. INFORM=0.
Interior/Direct NLP KNITRO
Locally optimal solution found
FuncEv 235 GradEv 1975 ConstrEv 234 ConJacEv 1975 Iter 206 MinorIter 231
CPU time: 9.203125 sec. Elapsed time: 9.203000 sec.
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Min Energy Transfer f_k 0.523085806417755370
sum(|constr|) 0.000000004935871044
f(x_k) + sum(|constr|) 0.523085811353626420
f(x_0) 0.522037502371971220
Solver: KNITRO. EXIT=0. INFORM=0.
Interior/Direct NLP KNITRO
Locally optimal solution found
FuncEv 113 GradEv 1732 ConstrEv 112 ConJacEv 1732 Iter 79 MinorIter 109
CPU time: 19.593750 sec. Elapsed time: 20.375000 sec.
end
% Get final solution
t = subs(icollocate(t),solution);
r = subs(icollocate(r),solution);
theta = subs(icollocate(theta),solution);
vr = subs(icollocate(vr),solution);
vt = subs(icollocate(vt),solution);
ur = subs(icollocate(ur),solution);
ut = subs(icollocate(ut),solution);
t1 = 0:0.5:solution.t_f;
r_inter = interp1p(t,r,t1);
theta_inter = interp1p(t,theta,t1);
ur_inter = interp1p(t,ur,t1);
ut_inter = interp1p(t,ut,t1);
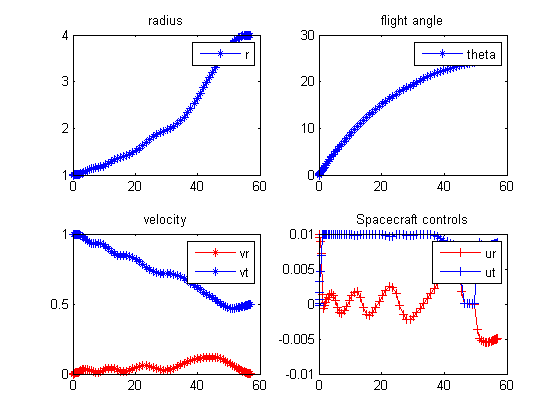
% Plot final solution
figure(1)
subplot(2,2,1)
plot(t,r,'*-');
legend('r');
title('radius');
subplot(2,2,2)
plot(t,theta,'*-');
legend('theta');
title('flight angle');
subplot(2,2,3)
plot(t,vr,'r*-',t,vt,'b*-');
legend('vr','vt');
title('velocity');
subplot(2,2,4)
plot(t,ur,'r+-',t,ut,'b+-');
legend('ur','ut');
title('Spacecraft controls');
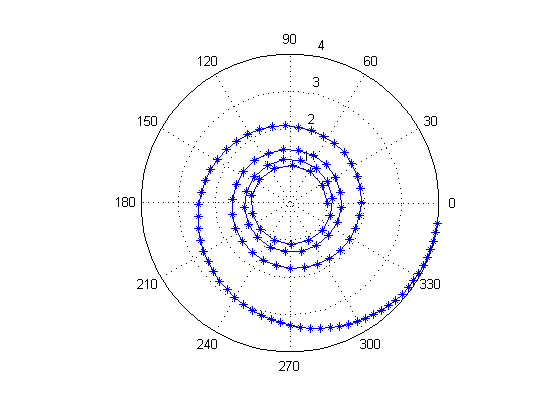
figure(2)
polar(theta_inter,r_inter,'*-')
grid on
axis equal