« Previous « Start » Next »
62 Marine Population Dynamics
Benchmarking Optimization Software with COPS Elizabeth D. Dolan and Jorge J. More ARGONNE NATIONAL LABORATORY
62.1 Problem Formulation
Find m and g over t in [0; 10] to minimize
subject to:
Where the data is given in the code.
Reference: [14]
62.2 Problem setup
t = tom('t');
m = tom('m',8,1);
g = tom('g',7,1);
% Various constants and expressions
ymeas = [...
20000 17000 10000 15000 12000 9000 7000 3000
12445 15411 13040 13338 13484 8426 6615 4022
7705 13074 14623 11976 12453 9272 6891 5020
4664 8579 12434 12603 11738 9710 6821 5722
2977 7053 11219 11340 13665 8534 6242 5695
1769 5054 10065 11232 12112 9600 6647 7034
943 3907 9473 10334 11115 8826 6842 7348
581 2624 7421 10297 12427 8747 7199 7684
355 1744 5369 7748 10057 8698 6542 7410
223 1272 4713 6869 9564 8766 6810 6961
137 821 3451 6050 8671 8291 6827 7525
87 577 2649 5454 8430 7411 6423 8388
49 337 2058 4115 7435 7627 6268 7189
32 228 1440 3790 6474 6658 5859 7467
17 168 1178 3087 6524 5880 5562 7144
11 99 919 2596 5360 5762 4480 7256
7 65 647 1873 4556 5058 4944 7538
4 44 509 1571 4009 4527 4233 6649
2 27 345 1227 3677 4229 3805 6378
1 20 231 934 3197 3695 3159 6454
1 12 198 707 2562 3163 3232 5566];
tmeas = 0:0.5:10;
% Box constraints
cbox = {
0 <= m
0 <= g
};
p = tomPhase('p', t, tmeas(1), tmeas(end), 2*length(tmeas), [], 'gauss');
setPhase(p);
y = tomState('y',8,1);
% Initial guess - linear interpolation between the data points
x0 = {m==0; g==0;
icollocate(y == interp1(tmeas,ymeas,t)')};
yerr = sum(sum((atPoints(tmeas,y) - ymeas).^2));
% ODE
ceq = collocate( dot(y) == [0; g].*[0; y(1:7)] - (m+[g;0]).*y );
62.3 Solve the problem
options = struct;
options.name = 'Marine Population Dynamics';
solution = ezsolve(1e-5*yerr, {cbox, ceq}, x0, options);
% Optimal y, m and g - use as starting guess
yopt = subs(y, solution);
mopt = subs(m, solution);
gopt = subs(g, solution);
Problem type appears to be: qpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Marine Population Dynamics f_k 197.465297161281340000
sum(|constr|) 0.000000124069941210
f(x_k) + sum(|constr|) 197.465297285351280000
f(x_0) -86874.198350960098000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 15 ConJacEv 15 Iter 14 MinorIter 432
CPU time: 0.718750 sec. Elapsed time: 0.407000 sec.
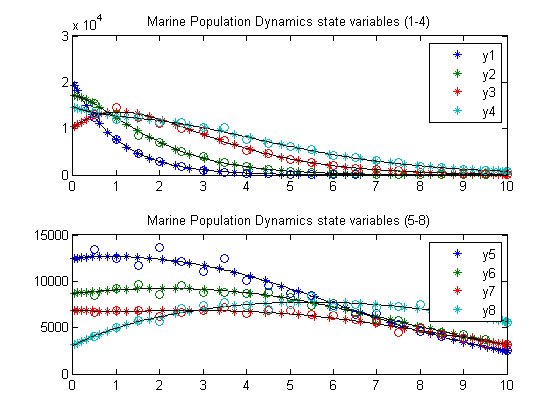
62.4 Plot result
subplot(2,1,1)
ezplot(y(1:4));
hold on
plot(tmeas,ymeas(:,1:4),'o');
hold off
legend('y1','y2','y3','y4');
title('Marine Population Dynamics state variables (1-4)');
subplot(2,1,2)
ezplot(y(5:8));
legend('y5','y6','y7','y8');
hold on
plot(tmeas,ymeas(:,5:8),'o');
hold off
title('Marine Population Dynamics state variables (5-8)');
« Previous « Start » Next »
