Example 5: DYNOPT User’s Guide version 4.1.0
M. Cizniar, M. Fikar, M. A. Latifi, MATLAB Dynamic Optimisation Code DYNOPT. User’s Guide, Technical Report, KIRP FCHPT STU Bratislava, Slovak Republic, 2006.
Find p1 and p2 over t in [0; 6 ] to minimize
| J = |
| ( x1(ti) − x1m(ti) )2 |
subject to:
| = x2 |
| = 1−2*x2−x1 |
where
| x0 = [p1 p2] |
| ti = [1 2 3 5] |
| x1m(ti) = [0.264 0.594 0.801 0.959] |
| −1.5 <= p1:2 <= 1.5 |
Reference: [13]
toms t p1 p2
x1meas = [0.264;0.594;0.801;0.959];
tmeas = [1;2;3;5];
% Box constraints
cbox = {-1.5 <= p1 <= 1.5
-1.5 <= p2 <= 1.5};
for n=[10 40]
p = tomPhase('p', t, 0, 6, n);
setPhase(p);
tomStates x1 x2
% Initial guess
if n == 10
x0 = {p1 == 0; p2 == 0};
else
x0 = {p1 == p1opt; p2 == p2opt
icollocate({x1 == x1opt; x2 == x2opt})};
end
% Boundary constraints
cbnd = initial({x1 == p1; x2 == p2});
% ODEs and path constraints
x1err = sum((atPoints(tmeas,x1) - x1meas).^2);
ceq = collocate({dot(x1) == x2; dot(x2) == 1-2*x2-x1});
% Objective
objective = x1err;
options = struct;
options.name = 'Parameter Estimation';
options.solver = 'snopt';
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
% Optimal x, p for starting point
x1opt = subs(x1, solution);
x2opt = subs(x2, solution);
p1opt = subs(p1, solution);
p2opt = subs(p2, solution);
Problem type appears to be: qp
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: 1: Parameter Estimation f_k 0.000000352979271145
sum(|constr|) 0.000000000000054134
f(x_k) + sum(|constr|) 0.000000352979325279
f(x_0) 0.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 Iter 5 MinorIter 17
CPU time: 0.015625 sec. Elapsed time: 0.016000 sec.
Problem type appears to be: qp
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: 1: Parameter Estimation f_k 0.000000355693079657
sum(|constr|) 0.000000000000071929
f(x_k) + sum(|constr|) 0.000000355693151586
f(x_0) -1.983813647020728800
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 MinorIter 40
CPU time: 0.015625 sec. Elapsed time: 0.016000 sec.
end t = subs(collocate(t),solution); x1 = collocate(x1opt);
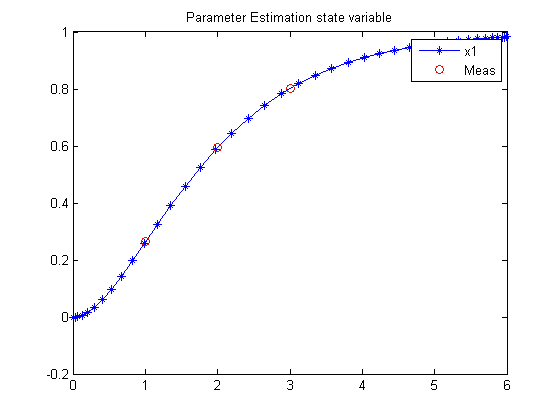
figure(1)
plot(t,x1,'*-',tmeas,x1meas,'ro');
legend('x1','Meas');
title('Parameter Estimation state variable');