« Previous « Start » Next »
95 Satellite Control
Users Guide for dyn.Opt, Example 7a, 7b, 7c
95.1 A satellite control problem
Find T (controls) over t in [0; 100 ] to minimize
7c is free end time
7a:
| J = | ∫ | | ((T12+T22+T32)*0.5) dt + |
| w12 + w22 + w32 + (e1 − 0.70106)2 + (e2 − 0.0923)2 + (e3 − 0.56098)2 + (e4 − 0.43047)2 |
7b:
| J = | ∫ | | ((T12+T22+T32)*0.5) dt |
7c:
subject to:
| = 0.5*(w1*e4−w2*e3+w3*e2) |
| = 0.5*(w1*e3+w2*e4−w3*e1) |
| = 0.5*(−w1*e2+w2*e1+w3*e4) |
| = −0.5*(w1*e1+w2*e2+w3*e3) |
| w(0) = [0.01 0.005 0.001] |
7b, 7c - x(100) = [0.70106 0.0923 0.56098 NaN 0 0 0]; 7c - free time 7c - -1 <= T <= 1
Reference: [16]
95.2 Problem setup
toms t
% Starting guess
e1opt = 0;
e2opt = 0;
e3opt = 0;
e4opt = 0;
w1opt = 0;
w2opt = 0;
w3opt = 0;
T1opt = 0;
T2opt = 0;
T3opt = 0;
% Final times
tfs = zeros(3,1);
for i=1:3
if i == 3
toms t_f
runs = [10 20 101];
else
runs = [10 40];
end
if i == 2
e1opt = 0; e2opt = 0;
e3opt = 0; e4opt = 0;
w1opt = 0; w2opt = 0;
w3opt = 0; T1opt = 0;
T2opt = 0; T3opt = 0;
end
for n=runs
if i == 3
p = tomPhase('p', t, 0, t_f, n);
else
p = tomPhase('p', t, 0, 100, n);
end
setPhase(p);
tomStates e1 e2 e3 e4 w1 w2 w3
tomControls T1 T2 T3
if i == 3
x0 = {t_f == 100};
else
x0 = {};
end
% Initial guess
x0 = {x0; collocate({T1 == T1opt
T2 == T2opt; T3 == T3opt})
icollocate({
e1 == e1opt; e2 == e2opt
e3 == e3opt; e4 == e4opt
w1 == w1opt; w2 == w2opt
w3 == w3opt})};
if i == 3
cbox = {
1 <= t_f <= 1000
-1 <= collocate(T1) <= 1
-1 <= collocate(T2) <= 1
-1 <= collocate(T3) <= 1};
else
cbox = {};
end
% Boundary constraints
cbnd = initial({e1 == 0
e2 == 0; e3 == 0
e4 == 1; w1 == 0.01
w2 == 0.005; w3 == 0.001});
95.3 Problem 7b and 7c modifications
if i ~= 1
cbnd = {cbnd
final({
e1 == 0.70106
e2 == 0.0923
e3 == 0.56098
w1 == 0
w2 == 0
w3 == 0
})};
end
% ODEs and path constraints
I1 = 1.0e6;
I2 = 833333.0;
I3 = 916667.0;
T1Sc = 550;
T2Sc = 50;
T3Sc = 550;
ceq = collocate({
dot(e1) == 0.5*(w1.*e4-w2.*e3+w3.*e2)
dot(e2) == 0.5*(w1.*e3+w2.*e4-w3.*e1)
dot(e3) == 0.5*(-w1.*e2+w2.*e1+w3.*e4)
dot(e4) == -0.5*(w1.*e1+w2.*e2+w3.*e3)
dot(w1) == ((I2-I3)*w2.*w3+T1*T1Sc)/I1
dot(w2) == ((I3-I1)*w3.*w1+T2*T2Sc)/I2
dot(w3) == ((I1-I2)*w1.*w2+T3*T3Sc)/I3});
% Objective
if i == 1
objective = final(w1)^2 + final(w2)^2 + final(w3)^2 +...
(final(e1) - 0.70106)^2 + (final(e2) - 0.0923)^2 + ...
(final(e3) - 0.56098)^2 + (final(e4) - 0.43047)^2 ...
+ integrate((T1.^2+T2.^2+T3.^2)*0.5);
elseif i == 2
objective = integrate((T1.^2+T2.^2+T3.^2)*0.5);
else
objective = t_f;
end
95.4 Solve the problem
options = struct;
if i == 1
options.name = 'Satellite Control 7a';
elseif i == 2
options.name = 'Satellite Control 7b';
else
options.name = 'Satellite Control 7c';
end
solution = ezsolve(objective, {cbox, cbnd, ceq}, x0, options);
e1opt = subs(e1, solution);
e2opt = subs(e2, solution);
e3opt = subs(e3, solution);
e4opt = subs(e4, solution);
w1opt = subs(w1, solution);
w2opt = subs(w2, solution);
w3opt = subs(w3, solution);
T1opt = subs(T1, solution);
T2opt = subs(T2, solution);
T3opt = subs(T3, solution);
Problem type appears to be: qpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7a f_k 0.463944669252504550
sum(|constr|) 0.000000135115457319
f(x_k) + sum(|constr|) 0.463944804367961870
f(x_0) 0.139185999999999230
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 27 ConJacEv 27 Iter 15 MinorIter 105
CPU time: 0.140625 sec. Elapsed time: 0.140000 sec.
Problem type appears to be: qpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7a f_k 0.463944366974706650
sum(|constr|) 0.000000000342695392
f(x_k) + sum(|constr|) 0.463944367317402020
f(x_0) -0.536077645550793180
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 3 ConJacEv 3 Iter 2 MinorIter 255
CPU time: 0.218750 sec. Elapsed time: 0.250000 sec.
Problem type appears to be: qpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7b f_k 71.411903807059261000
sum(|constr|) 0.000000066784327430
f(x_k) + sum(|constr|) 71.411903873843585000
f(x_0) 0.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 20 ConJacEv 20 Iter 17 MinorIter 205
CPU time: 0.140625 sec. Elapsed time: 0.141000 sec.
Problem type appears to be: qpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7b f_k 71.411593978634926000
sum(|constr|) 0.000000015292225816
f(x_k) + sum(|constr|) 71.411593993927156000
f(x_0) 71.236662445283258000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 5 ConJacEv 5 Iter 3 MinorIter 346
CPU time: 0.421875 sec. Elapsed time: 0.422000 sec.
Problem type appears to be: lpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7c f_k 99.185331597188878000
sum(|constr|) 0.000010903612751909
f(x_k) + sum(|constr|) 99.185342500801625000
f(x_0) 100.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 8 ConJacEv 8 Iter 6 MinorIter 83
CPU time: 0.078125 sec. Elapsed time: 0.078000 sec.
Problem type appears to be: lpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7c f_k 98.945461990937687000
sum(|constr|) 0.000017743233884652
f(x_k) + sum(|constr|) 98.945479734171570000
f(x_0) 100.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 5 ConJacEv 5 Iter 4 MinorIter 154
CPU time: 0.093750 sec. Elapsed time: 0.109000 sec.
Problem type appears to be: lpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Satellite Control 7c f_k 98.834204968061798000
sum(|constr|) 0.000012503587541902
f(x_k) + sum(|constr|) 98.834217471649339000
f(x_0) 100.000000000000000000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 7 ConJacEv 7 Iter 6 MinorIter 972
CPU time: 8.406250 sec. Elapsed time: 8.813000 sec.
end
tfs(i) = subs(final(t),solution);
% We only want to plot the solution from the first problem
if i == 1
tp = subs(collocate(t),solution);
e1p = subs(collocate(e1),solution);
e2p = subs(collocate(e2),solution);
e3p = subs(collocate(e3),solution);
e4p = subs(collocate(e4),solution);
w1p = subs(collocate(w1),solution);
w2p = subs(collocate(w2),solution);
w3p = subs(collocate(w3),solution);
T1p = subs(collocate(T1),solution);
T2p = subs(collocate(T2),solution);
T3p = subs(collocate(T3),solution);
end
end
disp(sprintf('\nFinal time for 7a = %1.4g',tfs(1)));
disp(sprintf('\nFinal time for 7b = %1.4g',tfs(2)));
disp(sprintf('\nFinal time for 7c = %1.4g',tfs(3)));
Final time for 7a = 100
Final time for 7b = 100
Final time for 7c = 98.83
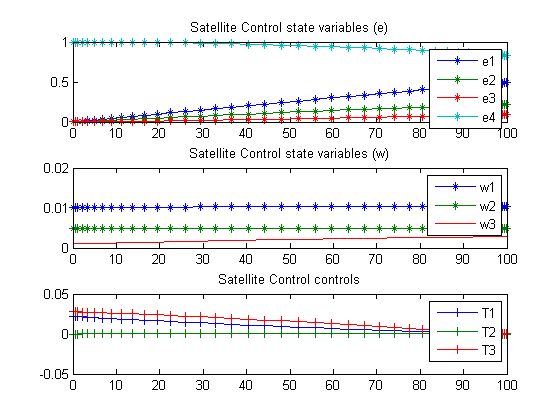
95.5 Plot result
subplot(3,1,1)
plot(tp,e1p,'*-',tp,e2p,'*-',tp,e3p,'*-',tp,e4p,'*-');
legend('e1','e2','e3','e4');
title('Satellite Control state variables (e)');
subplot(3,1,2)
plot(tp,w1p,'*-',tp,w2p,'*-',tp,w3p);
legend('w1','w2','w3');
title('Satellite Control state variables (w)');
subplot(3,1,3)
plot(tp,T1p,'+-',tp,T2p,'+-',tp,T3p,'+-');
legend('T1','T2','T3');
title('Satellite Control controls');
« Previous « Start » Next »
