Paper: LINEAR-QUADRATIC OPTIMAL CONTROL WITH INTEGRAL QUADRATIC CONSTRAINTS. OPTIMAL CONTROL APPLICATIONS AND METHODS Optim. Control Appl. Meth., 20, 79-92 (1999)
E. B. LIM(1), Y. Q. LIU(2), K. L. TEO(2) AND J. B. MOORE(1)
(1) Department of Systems Engineering, Research School of Information Sciences and Engineering, Australian National University, Canberra ACT 0200, Australia
(2) School of Mathematics and Statistics, Curtin University of Technology, Perth, WA 6845, Australia
Find u(t) over t in [0; 1 ] to minimize
| J = 0.5*x1(1)2 + 0.5* | ∫ |
| (x12 + u12 + u22) dt |
subject to:
| = 3*x1+x2 + u1 |
| = −x1+2*x2 + u2 |
| x1(0) = 4 |
| x2(0) = −4 |
| 0.5*x2(1)2 + 0.5* | ∫ |
| (x12 + u12 + u22) <= 80 |
Introduce a new variable to remove integral in constraint:
| = 0.5 * (x1.2 + u1.2 + u2.2) |
resulting in event constraint:
| 0.5*x2(1)2 + x3(1) <= 8 |
Reference: [24]
toms t
p = tomPhase('p', t, 0, 1, 50);
setPhase(p);
tomStates x1 x2 x3
tomControls u1 u2
% Initial guess
x0 = {icollocate({
x1 == 4-5*t
x2 == -4-1*t
x3 == 50*t
})
collocate({
u1 == -10+10*t
u2 == 14-12*t})};
% Boundary constraints
cbnd = {
initial({
x1 == 4
x2 == -4
x3 == 0
})
final(x2)^2/2+final(x3) <= 80};
% ODEs and path constraints
ceq = collocate({
dot(x1) == 3*x1+x2 + u1
dot(x2) == -x1+2*x2 + u2
dot(x3) == 1/2 * (x2.^2 + u1.^2 + u2.^2)
});
% Objective
objective = final(x1)^2/2 + final(x3);
options = struct;
options.name = 'Quadratic Constraint';
solution = ezsolve(objective, {cbnd, ceq}, x0, options);
t = subs(collocate(t),solution);
x1 = subs(collocate(x1),solution);
x2 = subs(collocate(x2),solution);
x3 = subs(collocate(x3),solution);
u1 = subs(collocate(u1),solution);
u2 = subs(collocate(u2),solution);
Problem type appears to be: qpcon
Starting numeric solver
===== * * * =================================================================== * * *
TOMLAB - Tomlab Optimization Inc. Development license 999001. Valid to 2011-02-05
=====================================================================================
Problem: --- 1: Quadratic Constraint f_k 67.888740121887395000
sum(|constr|) 0.000000192425266868
f(x_k) + sum(|constr|) 67.888740314312656000
f(x_0) 50.499999999999915000
Solver: snopt. EXIT=0. INFORM=1.
SNOPT 7.2-5 NLP code
Optimality conditions satisfied
FuncEv 1 ConstrEv 32 ConJacEv 32 Iter 31 MinorIter 280
CPU time: 0.593750 sec. Elapsed time: 0.578000 sec.
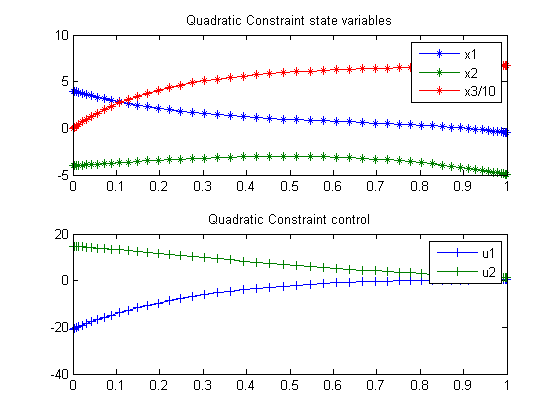
subplot(2,1,1)
plot(t,x1,'*-',t,x2,'*-',t,x3/10,'*-');
legend('x1','x2','x3/10');
title('Quadratic Constraint state variables');
subplot(2,1,2)
plot(t,u1,'+-',t,u2,'+-');
legend('u1','u2');
title('Quadratic Constraint control');